| ros1 和 ros2的区别 | 您所在的位置:网站首页 › ros ros2 cyberrt区别 › ros1 和 ros2的区别 |
ros1 和 ros2的区别
|
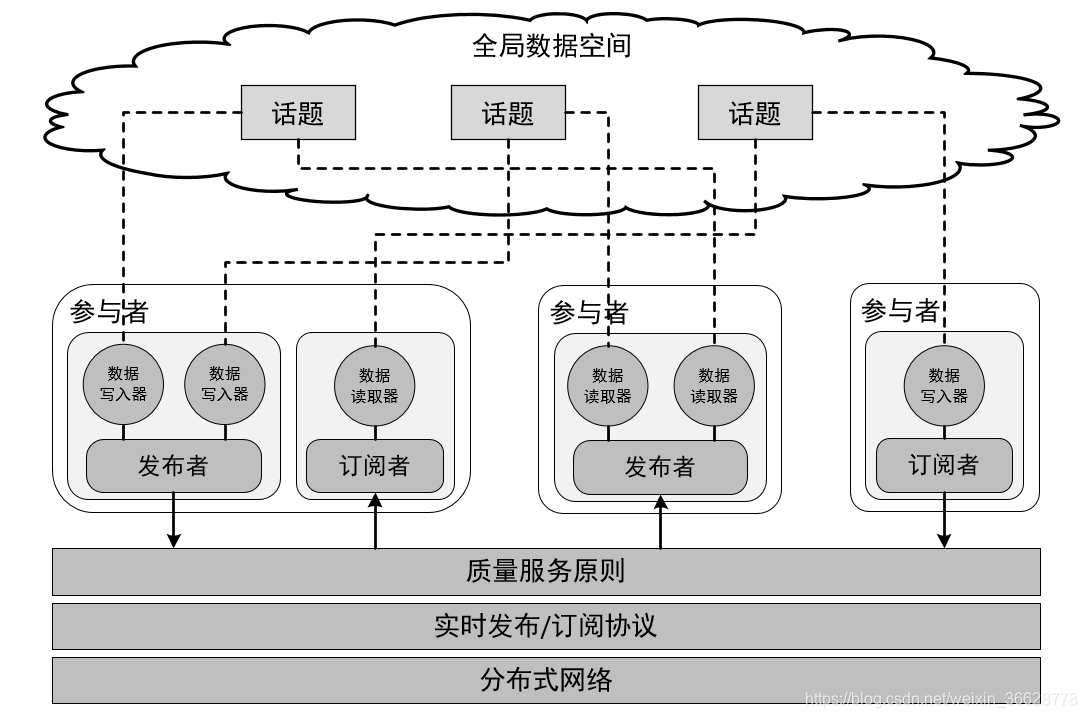
参与者(Domain Participant):一个参与者Participant就是一个容器,对应于一个使用DDS的用户,任何DDS的用户都必须通过Participant来访问全局数据空间。 发布者(Publisher):数据发布的执行者,支持多种数据类型的发布,可以与多个数据写入器(DataWriter)相联,发布一种或多种主题(Topic)的消息。 订阅者(Subscriber):数据订阅的执行者,支持多种数据类型的订阅,可以与多个数据读取器(DataReader)相联,订阅一种或多种主题(Topic)的消息。 数据写入器(DataWriter):应用向发布者更新数据的对象,每个数据写入器对应一个特定的Topic,类似于ROS1中的一个消息发布者。 数据读取器(DataReader):应用从订阅者读取数据的对象,每个数据读取器对应一个特定的Topic,类似于ROS1中的一个消息订阅者。 主题(Topic):这个和ROS1中的Topic概念一致,一个Topic包含一个名称和一种数据结构。 QoS Policy:Quality of Service,质量服务原则,这个模块在ROS1中可从没见过,看名称就猜测应该是负责数据质量的。QoS是DDS中非常重要的一环,控制了各方面与底层的通讯机制,主要从时间限制、可靠性、持续性、历史记录几个方面,满足用户针对不同场景的数据应用需求 |
【本文地址】
公司简介
联系我们